Probleemstelling
Voor personen met een ernstige meervoudige beperking is het meestal moeilijk om zelf een elektrische rolstoel of AKKA mobility platform te besturen. Sommige personen zouden dit wel kunnen mits ze gebruik zouden maken van een aangepaste joystick. Vandaag de dag zijn er slechts een beperkt aantal verschillende prefab joystick modellen in de handel te verkrijgen.
Als deze modellen niet afdoende zijn, dan kan een volledig gepersonaliseerd joystick ontwerp in sommige gevallen wel een oplossing bieden.
De vorm en uitvoering van een gepersonaliseerde joystick is zeer afhankelijk van de persoon, de ernst van de beperking en de eventuele aanwezigheid van congenitale misvormingen van de bovenste extremiteiten. Voor sommige personen zal een eenvoudig meer generiek joystick ontwerp volstaan, terwijl voor andere personen een anatomisch gevormd ontwerp nodig is.
Als deze modellen niet afdoende zijn, dan kan een volledig gepersonaliseerd joystick ontwerp in sommige gevallen wel een oplossing bieden.
De vorm en uitvoering van een gepersonaliseerde joystick is zeer afhankelijk van de persoon, de ernst van de beperking en de eventuele aanwezigheid van congenitale misvormingen van de bovenste extremiteiten. Voor sommige personen zal een eenvoudig meer generiek joystick ontwerp volstaan, terwijl voor andere personen een anatomisch gevormd ontwerp nodig is.
Werkwijze 1: Ontwerp van een generieke joystick
Stap 1: Bepalen van de mogelijkheden en voorkeuren van de eindgebruiker
Het nagaan van de mogelijke grijpfuncties van de eindgebruiker kan door het aanreiken van speelgoed. Tijdens het aanreiken van speelgoed kunnen zowel de mogelijkheden (bv. palmaire grijpfunctie, primitieve pincetgreep, …) als voorkeuren (bv. voorkeurshand) van de eindgebruiker geobserveerd worden.
Personen met een ernstige meervoudige beperking hebben vaak onvoldoende fijn motorische vaardigheden om gebruik te kunnen maken van de prefab joystick modellen. Sommigen hebben echter wel een voldoende ontwikkelde (radiale) palmaire grijpfunctie. Personen met zo'n intacte grijpfunctie kunnen baat hebben van een vergrote joystick.
De generieke joystick kan op maat gemaakt worden door de lengte, breedte en dikte van de joystick aan te passen aan de grootte van de hand van de eindgebruiker. De grootte van de hand kan makkelijk gemeten worden met bv. een lintmeter, meetlat of schuifmaat.
Personen met een ernstige meervoudige beperking hebben vaak onvoldoende fijn motorische vaardigheden om gebruik te kunnen maken van de prefab joystick modellen. Sommigen hebben echter wel een voldoende ontwikkelde (radiale) palmaire grijpfunctie. Personen met zo'n intacte grijpfunctie kunnen baat hebben van een vergrote joystick.
De generieke joystick kan op maat gemaakt worden door de lengte, breedte en dikte van de joystick aan te passen aan de grootte van de hand van de eindgebruiker. De grootte van de hand kan makkelijk gemeten worden met bv. een lintmeter, meetlat of schuifmaat.
Stap 2: Ontwerpen van een generieke joystick voor personen met een (radiale) palmaire grijpfunctie
|
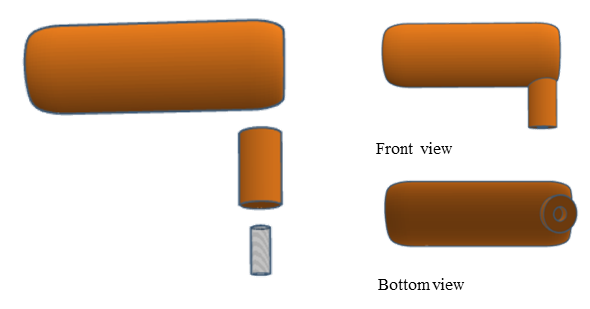
Daar het ontwerp van de generieke joystick voor personen met een (radiale) palmaire grijpfunctie eenvoudig is, kan dit ontworpen worden in een gratis low-end 3D-ontwerpsoftware, zoals bv. Tinkercad (Autodesk®). Het eerder eenvoudige design en de gratis te gebruiken 3D-ontwerpsoftware maakt het mogelijk voor therapeuten om dit zelf te ontwikkelen en aan te passen aan de noden van de eindgebruiker. Het huidige ontwerp van de generieke joystick bestaat uit twee cilinders die gecombineerd worden tot joystick. Daarbij wordt de cilinder die vastgehouden wordt door de eindgebruiker afgerond voor het comfort (geen scherpe randen). Tot slot wordt er ,door gebruik te maken van een holle cilinder, een opening voorzien langs de onderkant van de joystick om deze te kunnen bevestigen op de reeds voorziene joystick van de elektrische rolstoel of AKKA mobility platform. Deze opening wordt gecentraliseerd en heeft dezelfde diameter als van het pinnetje waarop de joystick gemonteerd wordt om stevig bevestigd te kunnen worden. |

|
Van dit ontwerp zijn, zoals hieronder getoond wordt, verschillende versies beschikbaar met of zonder voorgevormde uitsparingen voor de vingers.
De filmpjes hieronder tonen stap voor stap hoe de generieke joystick gemaakt kan worden in de gratis low-end 3d-ontwerpsoftware Tinkercad (Autodesk®). Het eerste filmpje toont het ontwerpen van de basisjoystick, het tweede filmpje toont hoe je de hoek kan aanpassen en het laatste filmpje toont hoe je eventueel voorgevormde uitsparingen voor de vingers kan voorzien.
|
|
|
Stap 3: 3D printen van het ontwerp
Eenmaal het 3D ontwerp de gewenste vorm heeft dient het enkel nog geprint te worden. Aangezien er geen grote krachten op dit hulpmiddel uitgeoefend worden kan dit hulpmiddel in principe met bijna elke 3D printtechniek geprint worden. Bij het uitwerken van deze case zijn de generieke joysticks geprint met behulp van de Multi jet fusion techniek.
Om de goede werking van dit hulpmiddel te garanderen is het essentieel dat het handvat juist hard genoeg klemt op het pennetje van de joystick. De precieze diameter die je het gat in het connectie stuk moet geven om dit te bekomen kan verschillen bij verschillende 3D printtechnieken. Je kan de gewenste diameter best even op voorhand uittesten vooraleer je de volledige joystick laat printen. Dit kan je eenvoudig doen door enkele test prints uit te voeren van het verbindingsstuk met een reeks verschillende diameters. Eenmaal je de optimale diameter geïdentificeerd hebt voor een specifieke printtechniek kan je ervan uitgaan dat deze diameter ook voor toekomstige joysticks, die je met dezelfde printtechniek print, zal werken.
Om de goede werking van dit hulpmiddel te garanderen is het essentieel dat het handvat juist hard genoeg klemt op het pennetje van de joystick. De precieze diameter die je het gat in het connectie stuk moet geven om dit te bekomen kan verschillen bij verschillende 3D printtechnieken. Je kan de gewenste diameter best even op voorhand uittesten vooraleer je de volledige joystick laat printen. Dit kan je eenvoudig doen door enkele test prints uit te voeren van het verbindingsstuk met een reeks verschillende diameters. Eenmaal je de optimale diameter geïdentificeerd hebt voor een specifieke printtechniek kan je ervan uitgaan dat deze diameter ook voor toekomstige joysticks, die je met dezelfde printtechniek print, zal werken.
Werkwijze 2: Ontwerp van een anatomisch gevormde joystick
Stap 1: Maatname van de vorm van de hand
|
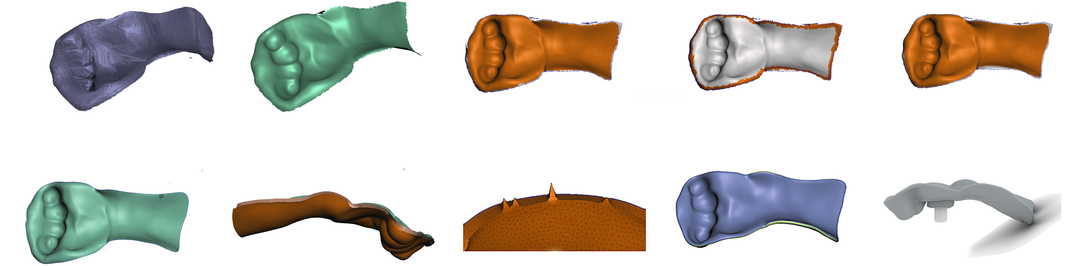
Als eerste stap in deze workflow is het belangrijk om de vorm van de hand correct vast te leggen. Hiervoor gaan we de hand 3D scannen met behulp van een 3D scanner. Afhankelijk van het gewenste detail in de scan kan deze 3D scan zowel gemaakt worden met behulp van low-end als high-end 3D scanners. Een goede 3D scan maken van de palmaire zijde van de hand is niet altijd even eenvoudig. Zo moet de persoon in staat zijn om zijn hand tijdens het scannen geruime tijd stil te houden in de gewenste positie. Bovendien kunnen contracturen ter hoogte van de hand het 3D scannen aanzienlijk bemoeilijken. Indien het toch te moeilijk blijkt om de hand rechtstreeks te 3D scannen, kan het noodzakelijk zijn om een extra maatname stap uit te voeren waarbij er een mal van de hand gemaakt wordt. Vervolgens kan deze mal ingescand worden m.b.v. een 3D scanner.
Er zijn verschillende creatieve oplossingen/methodes te bedenken om deze mal te maken. Zo kan er gebruik gemaakt worden van materialen als gips, gipswindels, was, playdoh, oasis of kneedbare silicone om de vorm van de palmaire zijde van de hand vast te leggen. Bij de uiteindelijke keuze van het materiaal dien je er wel op te letten dat dit materiaal eenvoudig in te scannen is. Bij het uitwerken van deze case werd gebruik gemaakt van kneedbare twee componenten silicone die geschikt is voor huidcontact. Het voordeel van dit materiaal is dat het zeer snel (na +- 4min ) uitgehard is waarna de vorm niet meer kan veranderen. Een anatomische joystick is mogelijks minder interessant indien de patiënt nog fel groeit of de anatomie nog fel kan veranderen ten gevolge van bijvoorbeeld een operatie. Dit zorgt er namelijk voor dat de pasvorm niet langer goed is. |
|
Stap 2: Ontwerp van de joystick met behulp van Meshmixer
Verschillende stappen in het ontwerp van de anatomisch gevormde joystick
|
In eerste instantie dien je een verbindingsstuk te ontwerpen dat precies past op het pennetje van de joystick waarop je de anatomische joystick wil bevestigen. Hiervoor kan je verschillende softwarepakketten gebruiken (Tinkercad, fusion 360,...). In het filmpje hiernaast wordt kort uitgelegd hoe je dit in fusion 360 kan doen.
|
|
Vervolgens dien je de anatomisch gevormde joystick te ontwerpen. In een volgende stap voeg je het anatomisch gevormde deel samen met het verbindingsstuk. In onderstaand filmpje tonen we je hoe je dit stap voor stap kan doen met behulp van de gratis Meshmixer software.
Stap 3: 3D printen van het ontwerp
Eenmaal het 3D ontwerp de gewenste vorm heeft dient het enkel nog geprint te worden. Aangezien er geen grote krachten op dit hulpmiddel uitgeoefend worden kan dit hulpmiddel in principe met bijna elke 3D printtechniek geprint worden. Omwille van de anatomische vorm van de joystick kan het ontwerp wel eenvoudiger te printen zijn met een printtechniek die geen support structuur nodig heeft tijdens het printen. Bij het uitwerken van deze case zijn de generieke joysticks geprint met behulp van de Multi jet fusion techniek.
|
Om de goede werking van dit hulpmiddel te garanderen is het essentieel dat het handvat juist hard genoeg klemt op het pennetje van de joystick. De precieze diameter die je het gat in het connectie stuk moet geven om dit te bekomen kan verschillen bij verschillende 3D printtechnieken. Je kan de gewenste diameter best even op voorhand uittesten vooraleer je de volledige joystick laat printen. Dit kan je eenvoudig doen door enkele test prints uit te voeren van het verbindingsstuk met een reeks verschillende diameters. Eenmaal je de optimale diameter geïdentificeerd hebt voor een specifieke printtechniek kan je ervan uitgaan dat deze diameter ook voor toekomstige joysticks, die je met dezelfde printtechniek print, zal werken.
|

Reeks van connectie stukjes met kleine variaties in diameter
|
Downloads
|
 Dit werk valt onder een Creative Commons Naamsvermelding-NietCommercieel-GelijkDelen 4.0 Internationaal-licentie. | ||||||
